
Loosely-coupled Stereo-IMU-Wheel SLAM for Sweep Robot
The framework of the program is based on ORB-SLAM3 and integrates other excellent work, such as VINS-Fusion, pl-slam, Structure-SLAM-PointLine, gf_orb_slam2 and semidense-lines. Line features are added to deal with low-texture environments; IMU and wheel encoder are added to deal with lighting variation and motion blur; Some work of Dr. Zhao is referenced for making SLAM cost-efficient.
The main work is as follows,
- VICON is used to obtain the ground truth of SLAM with an efficient pose and timestamp alignment algorithm referring to [1], [2], [3].
- IMU-camera and wheel-camera calibration.
- Referring to pl-slam and Structure-SLAM-PointLine, implement a complete visual SLAM system using both point and line features, which includes stereo matching, frame tracking, local mapping, bundle adjustment of both line feature and point feature, as well as point-line based loop detection.
- A loosely-coupled method to fusion multi-sensor information and estimate gyro bias, referring to VINS-Fusion.
- “Good feature matching” and “Local map hashing” are integrated.
- Atlas map in ORB-SLAM3 is modified to let the system never be lost.
- A semi-dense map construction algorithm, referring to semidense-lines, was modified for stereo camera.
Demo
SLAM visualization.
Map visualization.
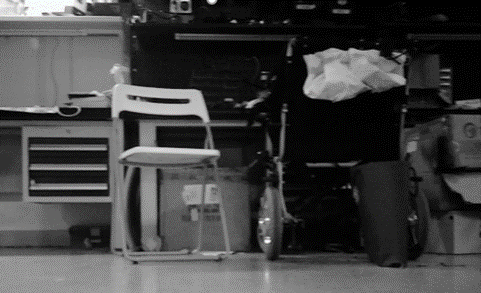
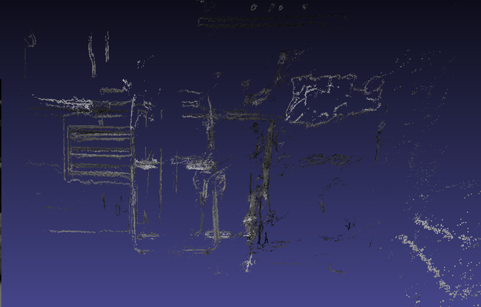
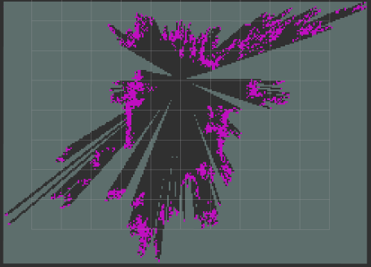
Left: RGB image; center: semi-dense map; right: grid map.